高等数学
This section introduces the functions used in the numerical integration & difference, interpolation, and Fourier analysis.
diff #
Description
1-order nD difference.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
v = diff(D); |
If D is a vector, returns the vector whose elements are the difference between the adjacent element of D. If D is a matrix, returns a matrix whose elements are the differences between the rows of D. |
v = diff(D, N); |
Returns a vector or matrix containing the N th difference of D by applying the diff(D) operation for N times. |
See also
integrate
integrate #
Description
Calculates nD integral.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
I = integrate(A, n, x1); |
Calculates the integral in the specified dimension of A designated by n according to the corresponding position vector x1 for that dimension. |
I = integrate(A, d, x1, x2, ...); |
Calculates the integral in the specified dimensions of A designated by vector d respectively according to the corresponding position vectors x1, x2, ... for those dimensions. |
Example
Example 1:
Calculates the integral of input 2D data.
y=[1,2,3;4,5,6];
# (2.5-1)*0.5*1+(2.5-1)*0.5*4
# (2.5-1)*0.5*2+(2.5-1)*0.5*5
# (2.5-1)*0.5*3+(2.5-1)*0.5*6
r = integrate(y,1,[1,2.5])
Result:
r =
3.75
5.25
6.75
Example 2:
Calculates multiple dimensions of integral.
y=zeros(2,3,2,2);
y(:,:,1,1) = [1,2,3;4,5,6];
y(:,:,2,1) = [7,8,9;10,11,12];
y(:,:,1,2) = [13,14,15;16,17,18];
y(:,:,2,2) = [19,20,21;22,23,24];
# integrate first and third dimensions
r = integrate(y, [1,3], [1,2], [1,4])
Result:
r =
16.5 52.5
19.5 55.5
22.5 58.5
interp #
Description
Calculates linear interpolation.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
interp(D, x, x1); |
Calculates 1D linear interpolation in new coordinates x1 according to old data D and old coordinates x. |
interp(D, x, y, x1, y1); |
Calculates 2D linear interpolation in new coordinates x1, y1 according to old data D and old coordinates x, y. |
interp(D, x, y, z, x1, y1, z1); |
Calculates 3D linear interpolation in new coordinates x1, y1, z1 according to old data D and old coordinates x, y, z. |
interp(D, x, y, z, t, x1, y1, z1, t1); |
Calculates 4D linear interpolation in new coordinates x1, y1, z1, t1 according to old data D and old coordinates x, y, z, t. |
Example
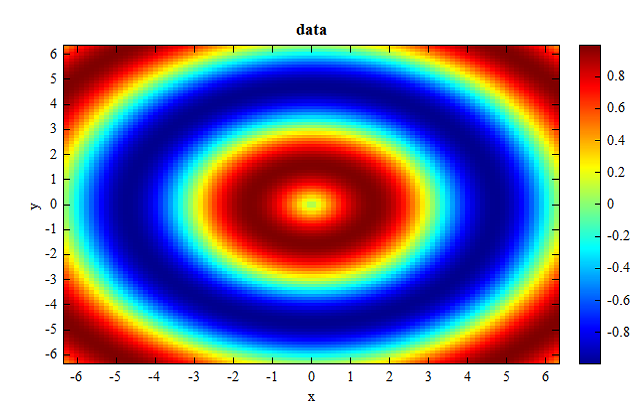
# 2D linear interpolation
x = linspace(-2*pi, 2*pi, 100);
y = linspace(-2*pi, 2*pi, 100);
data = zeros(length(y), length(x));
for (i = 1:length(x))
for (j = 1:length(y))
data(j, i) = sin(sqrt(x(i)^2 + y(j)^2));
end
end
figure();
image(x, y, data);
xlabel('x');
ylabel('y');
title('data');
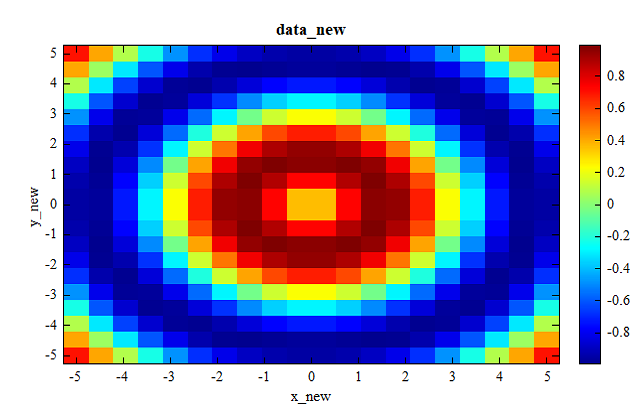
x_new = linspace(-5, 5, 20);
y_new = linspace(-5, 5, 20);
data_new =interp(data, x, y, x_new, y_new);
figure();
image(x_new, y_new, data_new);
xlabel('x_new');
ylabel('y_new');
title('data_new');
Result:
data(initial data):
new data:
fft #
Description
Fast Fourier Transform Algorithm.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
v = fft(D); |
Calculates the discrete Fourier transform (DFT) of D using a fast Fourier transform (FFT) algorithm. |
v = fft(D, N, dim); |
Calculates the N point discrete Fourier transform (DFT) of D using a fast Fourier transform (FFT) algorithm. |
v = fft(D, N, dim); |
Calculates the N point discrete Fourier transform (DFT) of D along the dimension designated by dim using a fast Fourier transform (FFT) algorithm. |
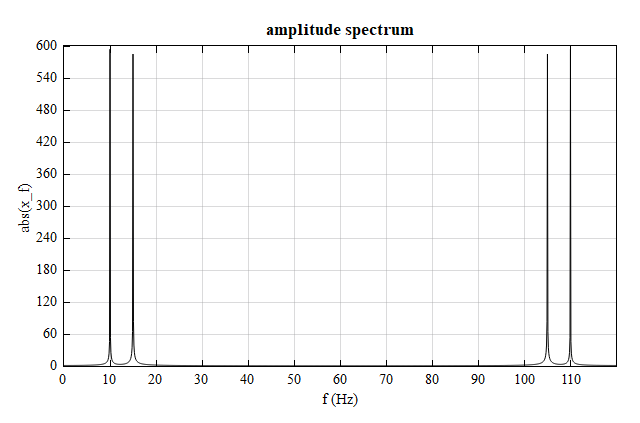
Example
f1 = 10; # frequency in Hz
f2 = 15;
fs = 120; # sampling frequency in Hz
Ts = 1/fs; # sampling period
t = -5:Ts:5;
L = length(t);
# time signal
x_t = cos(2*pi*f1*t) + sin(2*pi*f2*t);
# frequency spectrum
x_f = fft(x_t);
# frequency vector
f = 0:1:(L-1);
f = f*(fs/L);
# plot amplitude spectrum
figure;
plot(f, abs(x_f));
xlabel('f (Hz)');
ylabel('abs(x_f)');
title('amplitude spectrum');
Result(amplitude spectrum):
See also
fftshift
fftshift #
Description
Shifts zero frequency component to center of spectrum.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
v = fftshift(D); |
Shifts zero frequency component to center of spectrum for D. |
v = fftshift(D, dim); |
Shifts zero frequency component to center of spectrum for D along the designated dimension dim. |
Example
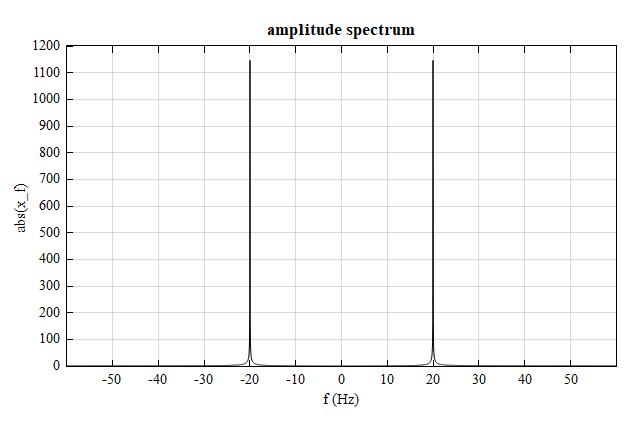
f0 = 20; # frequency in Hz
fs = 120; # sampling frequency in Hz
Ts = 1/fs; # sampling period
t = 0:Ts:20;
L = length(t);
# time signal
x_t = sin(2*pi*f0*t) ;
# frequency spectrum
x_f = fftshift( fft(x_t) );
L_h = (L-1)./2;
# frequency vector
f = -L_h:1:L_h;
f = f * fs /L;
# plot amplitude spectrum
figure;
plot(f, abs(x_f));
xlabel('f (Hz)');
ylabel('abs(x_f)');
title('amplitude spectrum');
Result(amplitude spectrum):
See also
fft
fft2 #
Description
Two-dimensional Fourier Transform.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
f = fft2(x); |
Returns the two-dimensional Fourier transform matrix with the same dimension as the matrix x. |
f = fft2(x, mrows, ncols) |
Returns the two-dimensional Fourier transform matrix with designated dimension ( mrows, ncols ). |
See also
fft
ifft #
Description
Inverse Fast Fourier Transform Algorithm.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
v = ifft(D); |
Returns the inverse Fourier transform matrix with the same dimension as the matrix D. |
v = ifft(D, N); |
Calculates the N point inverse discrete Fourier transform (DFT) of D by using inverse fast Fourier transform algorithm. |
See also
fft2
ifft2 #
Description
Two-dimensional Inverse Fourier Transform.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
f = ifft2(x); |
Returns the two-dimensional inverse Fourier transform matrix with the same dimension as the matrix x. |
f = ifft2(x, mrows, ncols); |
Returns the two-dimensional inverse Fourier transform matrix with designated dimension ( mrows, ncols ). |
See also
fft
fftw #
Description
Transforms a frequency vector from the input time vector.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
f = fftw(t, zero_pad); |
Returns the angular frequency vector of time vector t. The parameter zeros_pad determines the number of elements in the frequency vector. |
Note:
When the length of time vector is larger than zero_pad, zero_pad is exchanged as a new number, also a power of 2, up to the next power of 2 longer than the length of time; when the interval of the time is not an equal-radio data, also could calculate.
Example
t = [0.1, 1.1, 2.1, 3.1, 4.1, 5.1, 6.1, 7.2, 8.1, 9.1];
zero_pad = 2^4;
w = fftw(t,zero_pad);
Result:
w =
columns 1 through 8
0 0.392699082 0.785398163 1.17809725 1.57079633 1.96349541 2.35619449 2.74889357
columns 9 through 16
3.14159265 3.53429174 3.92699082 4.3196899 4.71238898 5.10508806 5.49778714 5.89048623
See also
fft
dft #
Description
Calculates the discrete fourier transform.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
f = dft(D, frequency_point, delta_time, frequency_length) ; |
Calculates the discrete fourier transform of D in designated frequency point and length with delta time delta_time. |
See also
fft
czt #
Description
Computes the 1D or 2D chirped z-transform ( or inverse chirped z-transform ) for the defined signal.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
z = czt(signal, pos, pos_trans, type ); |
If type is 1, computes the 1D chirped z-transform of the defined signal signal . The input signal signal is a function of the independent variable pos ( usually time ) and pos_trans is the transform domain positions ( usually angular frequency in frequency domain ). If type is not 1, iczt ( inverse chirped z-transform ) will be operated. |
z = czt(signal, xpos, ypos, xpos_trans, ypos_trans, type); |
If type is 1, computes the 2D chirped z-transform of the defined signal signal . The input signal signal is a function of the independent variables xpos and ypos. And xpos_trans, ypos_trans are the transform domain positions. If type is not 1, iczt ( inverse chirped z-transform ) will be operated. |
Example
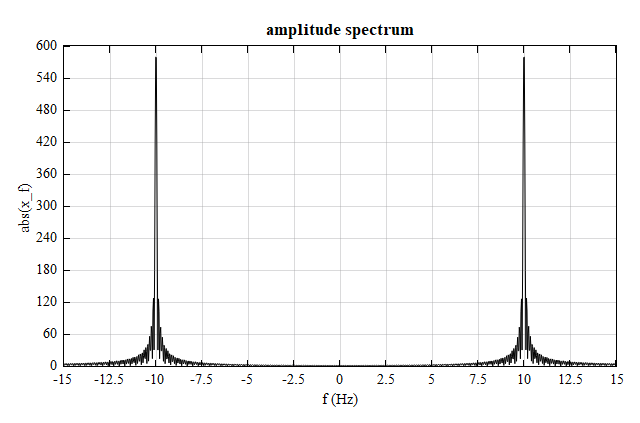
clear;
clc;
f0 = 10; # frequency in Hz
fs = 120; # sampling frequency in Hz
Ts = 1/fs; # sampling period
t = -5:Ts:5;
# time signal
x_t = cos(2*pi*f0*t);
# frequency
f = linspace(-15, 15, 1000);
w = f*2*pi;
# frequency spectrum
x_f = czt(x_t, t, w);
# plot amplitude spectrum
figure;
plot(f, abs(x_f));
xlabel('f (Hz)');
ylabel('abs(x_f)');
title('amplitude spectrum');
Result(amplitude spectrum):
See also
fft
czt1d #
Description
Computes the 1D chirped z-transform(or inverse chirped z-transform) for the defined signal.
Used in FDTD and FDE.
Syntax
| Code | Function |
|---|---|
czt1d(x_t, t, omega, type); |
If type is 0, calculates the 1D chirped z-transform of time signal x_t at each desired angular frequency omega . The input signal x_t is a function of the independent variable t (usually time) and omega is angular frequency in frequency domain. If type is not 0, iczt(inverse chirped z-transform) will be operated. |
See also
czt
filter #
Description
Calculates discrete time recursive filter.
Used in FDTD and FDE.
principle:
filter is an implementation of the standard difference equation:
y[n]=b(1)∗x[n]+b(2)∗x[n−1]+...+b(z+1)∗x[n−z]−a(2)∗y[n−1]−a(p+1)∗y[n−p]
The filter is implemented using a method described as a 'Direct Form II Transposed' filter. For more information see Chapter 6 of 'Discrete-Time Signal Processing' by Oppenheim and Schafer.
Syntax
| Code | Function |
|---|---|
out = filter( B, A, X ); |
Implements a discrete time recursive filter according to parameters B, A, X. The meanings of the parameters can be seen below. |
out = filter( B, A, X, Zi ); |
Implements a discrete time recursive filter according to parameters B, A, X, Zi. The meanings of the parameters can be seen below. |
The inputs to filter are:
- B
The numerator coefficients, or zeros of the system transfer function. The coefficients are specified in a vector like:
[ b(1) , b(2) , ... b(z) ] - A
The denominator coefficients, or the poles of the system transfer function. The coefficients are specified in a vector like:
[ a(1) , a(2) , ... a(p) ] - X
A vector of thefilterinputs. - Zi
[Optional] The initial delays of the filter.
Thefilteroutputs are in a struct with element names: - y
The filter output. y is a vector of the same dimension as X. - zf
A vector of the final values of the filter delays.
Note:
The a(1) coefficient must be non-zero, as the other coefficients are divided by a(1).
Example
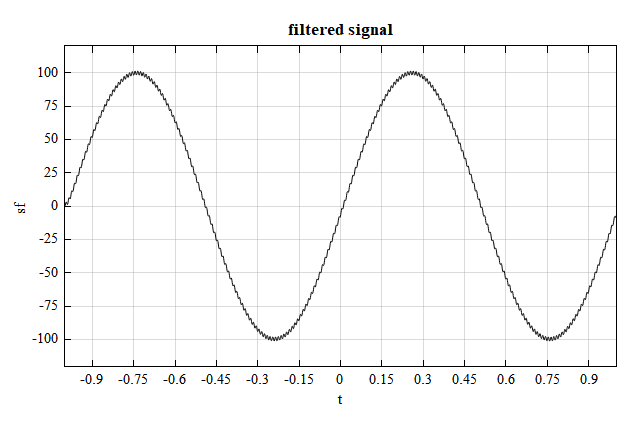
Below is an implementation of a simple lowpass filter using the filter function. The lowpass filter depends on the following difference equation:
y[n]=1+Tsωc1y[n−1]+1+TsωcTsωcx[n]
clear;
clc;
fs = 1000; # sample frequency
Ts = 1/fs; # sample period
w1 = 2*pi;
w2 = 100*2*pi;
wc = 100;
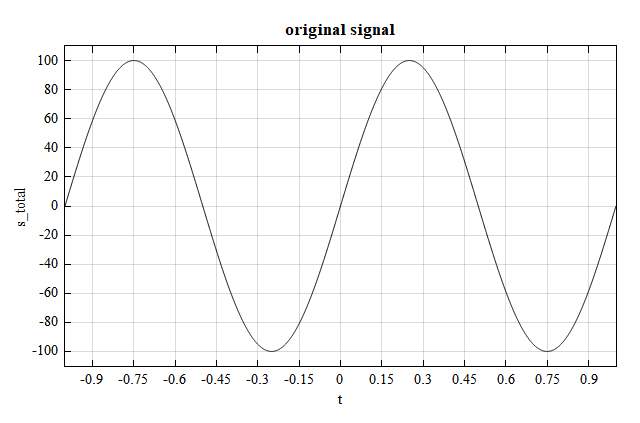
t = -1:Ts:1;
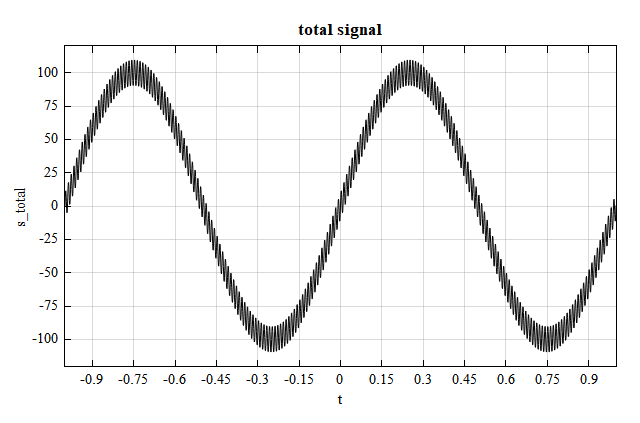
s1 = 100*sin(w1*t); # original signal
sn = 10*sin(w2*t); # high frequency noise
s_total = s1 + sn;
cf = 1/(1 + Ts*wc);
a = [1, -cf];
b = 1 - cf;
sf = filter(b, a, s_total);
figure;
plot(t, s1);
xlabel('t');
ylabel('s_total');
title('original signal')
figure;
plot(t, s_total);
xlabel('t');
ylabel('s_total');
title('total signal')
figure;
plot(t, sf.y);
xlabel('t');
ylabel('sf');
title('filtered signal');
Result:
original signal:
total signal:
filtered signal: